Google DeepMind unveils Genie 3, a photorealistic world model
Serge Bulaev
Google DeepMind has introduced Genie 3, a system that can turn short text prompts into realistic, interactive 3D environments. Genie 3 may help robots learn and practice tasks by letting them explore these virtual worlds in real time. Some companies are starting to test robots that use these advanced models in places like factories and homes, but there still appears to be a gap between how these robots perform in simulations versus the real world. Experts suggest combining simulation with real-world practice could help close this gap, though it might not solve it completely.
The era of Physical AI is accelerating as models like Google DeepMind's Genie 3, a photorealistic world model, move from research to reality. This groundbreaking technology enables AI to predict future events in complex scenes, with companies now deploying these models in simulators, on factory floors, and in early consumer pilots. The core concept is simple yet powerful: an AI that can generate and interact with a physics-aware virtual world can also power a robot to navigate the real one.
Google Genie 3 - a photorealistic sandbox
Google DeepMind's Genie 3 is a generative world model capable of creating interactive, photorealistic 3D environments from simple text prompts. It renders these virtual worlds in 720p at real-time frame rates, allowing an agent or robot to explore and interact with a dynamic, physics-aware space.
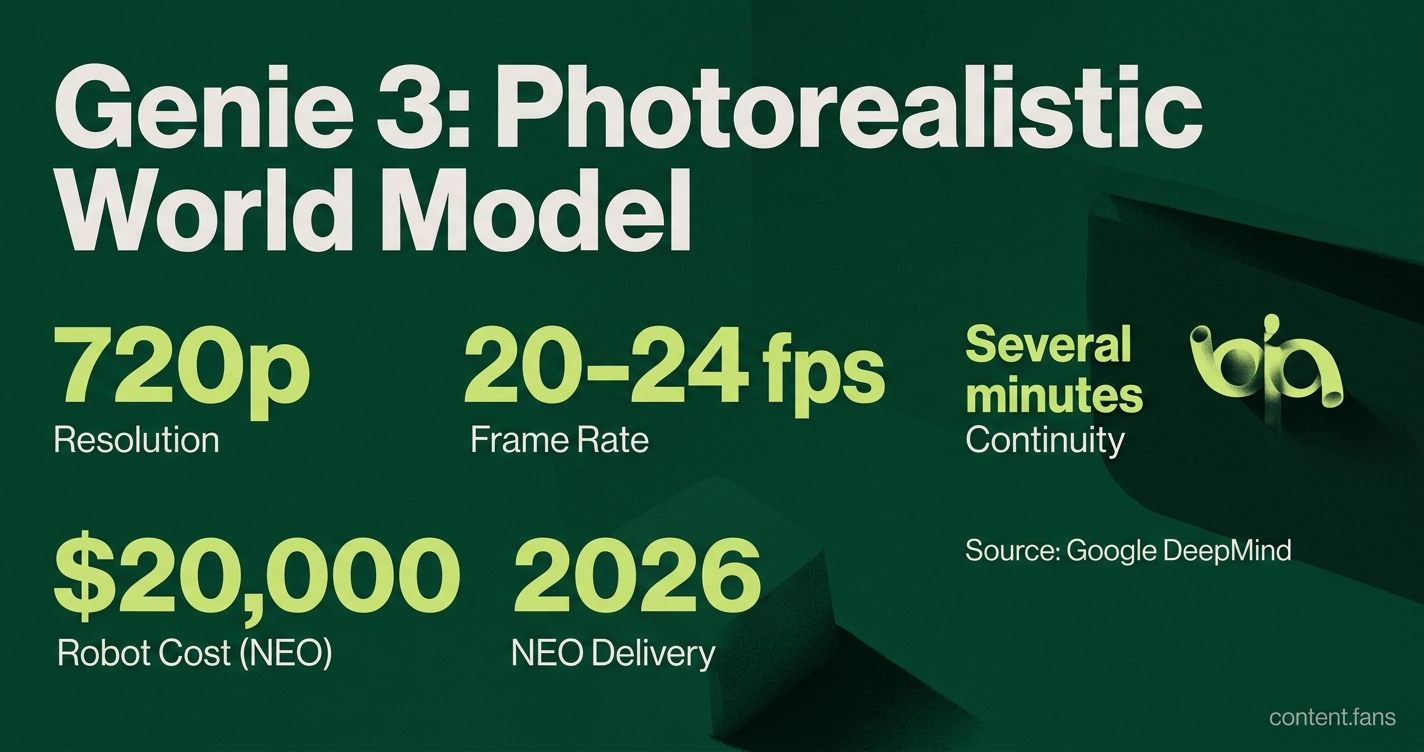
As detailed by DeepMind, Genie 3 is a general-purpose world model that transforms text prompts into 720p environments running at 20-24 fps while maintaining consistency for several minutes. The system is built for real-time interaction, allowing an agent to explore the generated space as its visuals and dynamics adapt continuously. Google DeepMind described Genie 3 as useful for training and evaluating AI agents, including robotics-related applications, but the available original sources here do not show any Street View data link. Access remains limited according to industry reports, with testing ongoing in research settings.
Early analysis highlights three capabilities crucial for embodied agents:
- Interactive physics: Effects like water, shadows, and object collisions are useful for complex manipulation studies.
- World continuity: Coherence across several minutes may indicate the model's memory can support multi-step tasks.
- Rapid rendering: Fast updates keep control latency within real-time thresholds for robotics simulation.
Humanoid pilots show the market test
As generative world models mature, leading humanoid robot platforms are already undergoing pilots using advanced vision-language-action (VLA) policies. According to industry reports, Figure 02 humanoid robots have been deployed at BMW facilities for extended testing periods, handling significant numbers of automotive parts. NEO is reported as a $20,000 household humanoid with deliveries planned for 2026, representing one of the first consumer-targeted humanoid robots for household tasks.
Industry observers note the common element in these deployments: an integrated model that fuses perception, language, and motor control, allowing the robot to replan actions dynamically. This marks a significant industry shift from rigid, pre-programmed task pipelines toward adaptable policies trained extensively in synthetic environments.
The sim-to-real gap remains
Despite these advances, the "sim-to-real" gap remains a critical hurdle. Researchers report that robotic policies still suffer significant drops in success rate when transferred from simulation to physical hardware, especially in contact-rich manipulation tasks. Industry analysis suggests the root cause is not visual discrepancies but inaccurate modeling of contact physics.
Promising strategies to mitigate this deficit include deploying GPU-accelerated parallel simulators, using real-world data to fine-tune simulation parameters like friction, and employing hybrid training that combines synthetic data with brief real-world episodes. While these methods can narrow the performance gap, experts agree they are unlikely to eliminate it completely.
Outlook for World Models and Physical AI
The critical benchmark for the future of world models and Physical AI is their ability to maintain coherent physics under continuous, closed-loop control. If models like Genie 3 can extend world continuity from minutes to hours without diverging from reality, it could give industrial integrators the confidence to replace significant portions of expensive real-robot testing with efficient synthetic rehearsals.
What is Google DeepMind's Genie 3 and why does it matter for robotics?
Genie 3 is a photorealistic world model that turns a short text prompt into an interactive 720p environment you can walk through at 24 frames per second. DeepMind positions it as a general-purpose simulator: the same codebase can create a robotics training ground, a physics playground where water, shadows, and object contacts change in real time. According to industry reports, research access has begun in limited settings, though no full commercial release exists yet. The fidelity is reportedly high enough that some industrial pilots are testing synthetic assembly lines built with similar world models.
How does Genie 3 close the "sim-to-real" gap?
Traditional simulators look perfect in the lab and fail once a real robot gripper touches foam or metal. Genie 3 attacks three brittle points:
- Visual gap - the 720p output is photoreal enough that vision networks pre-trained on Genie frames show promising performance when moved to the real world, according to early research reports.
- Contact gap - because Genie simulates physics-aware interactions (objects fall, splash, or dent), policies trained inside it learn to expect dynamics variation instead of a static scene.
- Data volume - one hour of Genie generation produces significantly more annotated frames than typical lab collection methods can achieve in the same timeframe.
Still, contact-rich tasks like peg-in-hole remain outside the reliability zone; most teams pair Genie with real-to-sim calibration that fits friction and stiffness from real-robot clips, then randomizes around those values.
Which humanoid robots already run on multimodal world models?
Several deployments are being reported in industry circles:
- Figure 02 at BMW facilities - extended pilot programs with significant parts handling operations.
- 1X NEO - announced as a consumer humanoid, $20k pricing, deliveries planned for 2026.
- Apollo by Apptronik - pilot programs with Mercedes-Benz for assembly operations.
Many lean on vision-language-action (VLA) pipelines with various AI models. None is fully autonomous yet - human supervision remains standard practice during operations.
What limits physical AI today?
Perception robustness and latency dominate recent failure reports:
- Vision dropouts - Policies trained on pristine synthetic frames can see performance drops when lighting conditions vary significantly in factory environments.
- Control lag - Real-time inference requirements face challenges from network jitter and processing delays that can exceed optimal budgets for contact-rich tasks.
- Safety certification - Regulators require extensive verification processes for AI-controlled systems, extending deployment timelines significantly.
When will world-models move from lab demos to factory floors?
Initial deployments in controlled industrial settings are reportedly being planned by major automakers. Advanced applications involving human-robot collaboration await regulatory updates and safety standard developments. If major AI companies release the anticipated benchmarks, industry observers expect automotive manufacturers to significantly scale their humanoid robot deployments in the coming years.